

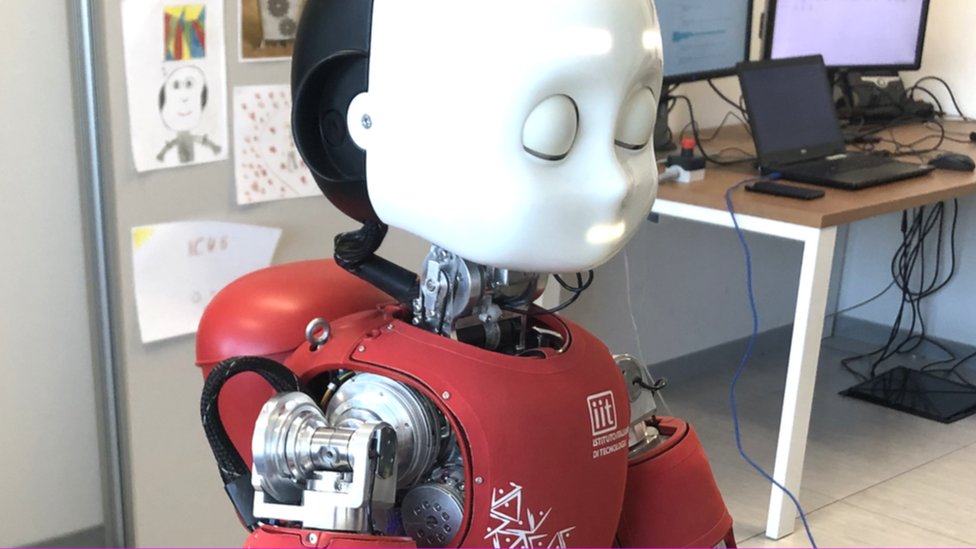
أجلس على طاولة مقابل روبوت بشري رائع يحمل إسم “آي كوب”، كل واحد منا يحمل عصاه وأمامه صندوقه كي نقرع عليهما معاً بإيقاع خفيف. لكنني بالطبع أشاهد الروبوت أيضاً، وأعلم أنه يراقبني.
جرى تصميم تجربة قرع الطبول لاختبار كيفية تأثير وجود روبوت يقوم بنفس المهمة على سلوك الإنسان.
إنها واحدة من تجارب عديدة عن التفاعل بين الإنسان والروبوت يقوم بها فريق البحث كونتاكت، وهو اختصار لـ (هندسة تعلم التقنيات المشتركة) في المعهد الإيطالي للتكنولوجيا في مدينة جنوة.
انتبه للأضواء والأشخاص الآخرين في الغرفة، إلا أن نظري كان منصباً باستمرار على جفني آي كوب البيضاء الثقيلة.
لسبب وحيد هو الضوضاء الواضحة لرفة جفن الروبوت كل بضع ثوان، وبسبب امتلاك هذا الروبوت الشبيه بالطفل عيوناً معبرة وضخمة، وبالتالي نظرته في غاية الوضوح.
هذا شيء مهم، لأنه مع رمش العين، كما مع جوانب أخرى لنظرة العين، هناك أكثر من مجرد تلاقي العيون.
تعلق هيلينا كيلافوري، الباحثة في علم النفس في جامعة تامبيري بفنلندا على ذلك قائلة: “في حين يُفترض أن تكون وظيفة رفة العين مجرد عملية فيزولوجية انعكاسية مرتبطة بوظيفة حماية وترطيب العين في معظم الاحيان، إلا أنها تلعب أيضاً دوراً مهماً في التفاعل المتبادل”.
رفة عين الإنسان تلفت الانتباه وتدل على ومشاعره وهي وسيلة للتواصل غير اللفظي. هي تعبر عن عدد من الأشياء التي لا ندركها بوعي، مثل من يجب أن يبدأ بالمحادثة أو دور من فيها. وبالتالي، فهي مجرد واحدة من العديد من الإشارات الاجتماعية التي يتبادلها البشر باستمرار دون إدراك، ولكن يستخلصون قدر كبيراً من المعلومات والمشاعر عن طريقها.
لذلك كان علماء الروبوتات الاجتماعيين يدرسون الخصائص الجسدية والنفسية لرفة العين لدى الإنسان لفهم لماذا قد يكون من المفيد تطبيقها على الروبوتات.
تقول كيلافوري: “نظراً للوظائف العديدة المهمة للرمش في السلوك البشري، يمكن الافتراض بأن وجود الروبوتات القادرة على رف جفونها مثل البشر يجعلها أقرب للبشر بشكل كبير. وهذا بدوره يمكن أن يسهل التفاعل بين الإنسان والروبوت”.
بعبارة أخرى، يقول ديفيد هانسون، الذي يقود شركة هانسون للروبوتات: “عندما ترف الروبوتات جفونها بطريقة جيدة، يشعر الناس بطبيعتها”.
في الواقع، يُظهر بحث فريق كونتاكت الذي أجري على مجموعتين هما الأطفال في سن الـ 13 عاماً، والبالغين، أن المجموعتين ببساطة تفضلان الروبوتات التي ترف جفونها أكثر.
ويمكن أن تعطي الروبوتات التي لا ترمش، انطباعاً غير سار ويظهر وكأنه يحدق بالشخص، كما تشير أليساندرا سيوتي، التي تقود وحدة كونتاكت.
يعتقد البشر أيضاً أن الروبوتات التي ترف جفونها بشكل طبيعي أكثر ذكاءً. والذكاء مهم في المواقف التي يعتمد فيها البشر على الروبوتات للحصول على المعلومات، كما هو الحال في محطات القطار.
على الرغم من فوائد رفة العين الطبيعية، إلا أن تطبيقها على الروبوتات يمثل تحدياً تقنياً.
توضح كيلافوري أن “رفة العين هي واحدة من أدق الحركات البشرية، لذا فإن تصميم الآليات التي يمكنها أن تحاكي هذه الحركات يتطلب تقنية متقدمة، مثل المحركات عالية الدقة”.
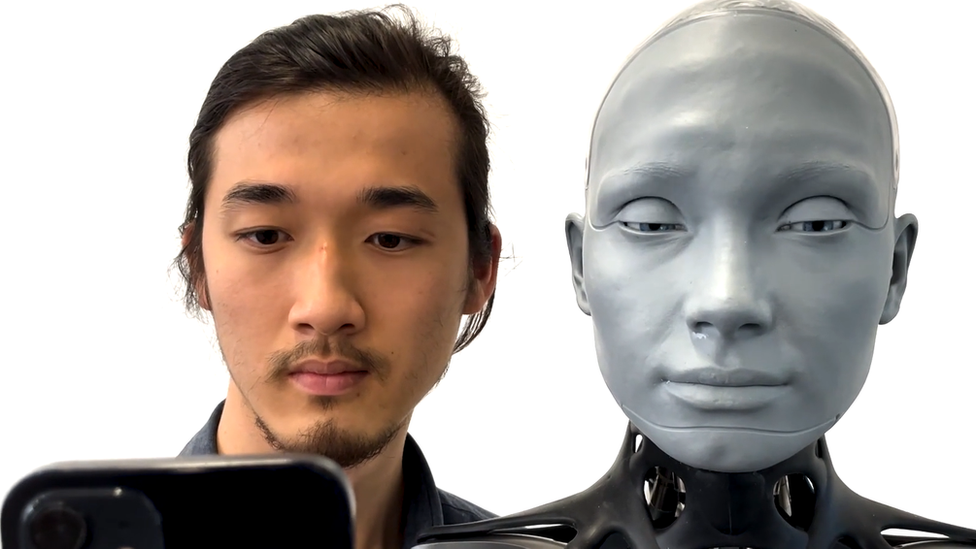
يستخدم علماء الروبوتات في شركة Engineered Arts ، على سبيل المثال، محركات باهظة الثمن ذات خصائص عالية الأداء كتلك المستخدمة في تقنيات الفضاء بالإضافة إلى تصميم إلكترونيات تحكم خاصة بهم.
يقول هانسون من شركة هانسون للروبوتات: “إن سرعة المحركات التي تحرك مادة الجلد عند الرمش تمثل تحدياً حقيقياً، كما يمثل جعل شكل العين يبدو طبيعياً أثناء حدوث الرمش تحدياً آخر، بالإضافة إلى تقليل الاحتكاك بين الجفون الصناعية وسطح العين”.

هناك مشكلة أخرى وهي الانسجام بين سرعة الرمش والصوت الواضح لهذه العملية عند الروبوت الآلي.
يقول فرانشيسكو ريا، أحد كبار الفنيين في وحدة كونتاكت، إن باستطاعة محرك أكثر هدوءاً في روبوت آي كوب، أن يحد من الضجيج الناجم عن رفة العين لدى الروبوت الآلي، لكن الحركة الأبطأ تجعل الروبوت يبدو وكأنه يعاني من النعاس أو أشبه بقطة.
كما أن الرمش البطيئ جداً قد يتسبب بفقدان المعلومات البصرية التي تصل عبر العين، حيث توجد كاميرا آي كوب خلف العينين.
ويقول ري: ” عند النظر فقدان لقطتين لا يمثل مشكلة كبيرة، ولكن فقدان عشر لقطات مشكلة كبيرة”.
تضيف كيلافوري: “يتمثل التحدي الآخر في التوقيت الصحيح ومدة الرمش”.
الوظائف المختلفة التي تقوم بها رفة العين – مثل تغير وتيرة سرعتها أثناء الكذب – تتضمن ديناميكيات مختلفة لحركة الجفن بالإضافة إلى تعبيرها عن حالات عاطفية مختلفة.
وتقول: “أي انحراف عن عدد مرات رفة العين الطبيعية والملائمة في سياق معين، يمكن أن يجعل الروبوت يبدو غريباً ومخيفاً”.
يستخدم فريق كونتاكت، برنامجاً يجعل الفواصل الزمنية بين الرمش الفردي والمزدوج عشوائية جزئياً، إذ أن الرمش بسرعة ثابتة لا يبدو طبيعياً أيضاً.
في مركز أبحاث ديزني، اجتمع علماء الروبوتات مع رسامي الرسوم المتحركة لتطوير نموذج بحثي أولي لنظرة روبوت واقعية. الهدف هو تصميم نظام معبر عن نظرة العين يسهل على رسامي الرسوم المتحركة التحكم فيه من أجل نقل المشاعر الحقيقية بدقة.
مع وجود عناصر مثل انثناءات الجفن عند الحركة واستبعاد السلوكيات الفردية نوعاً ما، يصبح من الأسهل كثيراً التركيز على تصحيح الجوانب والتفاصيل الصغيرة”، كما يقول جيمس كينيدي، عالم أبحاث في مركز ديزني للبحوث.
لقد حصلوا على براءة اختراع لنظامهم الخاص بشعور الروبوت والتحكم في نظرة عينه، يتضمن النظام برنامجاً لمعالجة الصور الملتقطة بواسطة الكاميرا المثبتة في صدر الروبوت، وتوليد إشارات تحكم بالحركات مثل حركة فتح الجفون وإغلاقها.
يقول كينيدي إن البحث لا يزال تجريبياً، ولم يتم تطبيقه بعد في حديقة ديزني للملاهي.
“كان هدفنا هو اختيار إشارة واحدة كنا مهتمين بها ودفعها إلى أقصى حد ممكن لخلق حركة وسلوكي واقعيين قابلين للتصديق واللتين شعرنا أنهما ستوفران منصة للتفاعل مع الناس”.
تحتاج التكنولوجيا بحاجة إلى تحسين، مثل جعل نظرة العين قابلة للتصديق في التفاعل مع البشر عن قرب لأطول مدة ممكنة.
يتمثل التحدي الآخر في جعل الروبوتات الشبيهة بالبشر ، البدء بتوقيت أنماط رمش العين مع تلك التي يستخدمها البشر أثناء المحادثة.
تظل هذه الأنواع من التحديات معضلة لدى بعض علماء الروبوتات.
وخلافاً لتصورات العامة المبالغ بها عن الروبوتات التي لا يمكن تمييزها عن البشر، فإن الرمش هو مثال صغير على العديد من التعقيدات التي لا تزال تمنع التفاعلات الروبوتية من الظهور بشكل طبيعي تماماً.
عند محاولة تقليد حركة صغيرة لا تحظى بأهمية مثل رفة العين، “فإنك في الواقع تكشف مدى تعقيد هذه الآلية، ومن ثم مقدار الحركة الدقيقة الموجودة فيها”، بحسب ما يلاحظ كينيدي.
ويضيف: وهذا يقدم لنا فرصة رائعة حقاً للاستكشاف والاختراع”.






